Равновесие и стабилизация: о гироскутерах и перевернутых маятниках
Москва
Площадки в ВУЗах, музеях, научных центрах
12 октября 2019
12:00 — 16:00
- 2444 просмотра
Создал: ipu / чт, 08/08/2019 - 14:20
мастер-класс
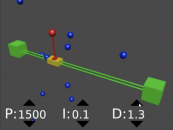
Наверное, сегодня уже все знают, как работает гироскутер. Сигнал с гироскопического датчика поступает на плату управления, которая выдаёт нужные команды электродвигателям. Но что именно происходит в процессоре? Каков алгоритм стабилизации?
Сотрудниками лаборатории систем с разрывными управлениями создан специальный стенд для тестирования разнообразных алгоритмов стабилизации. Попытайтесь стабилизировать обратный маятник напрямую (с помощью джойстика), применив ПИД-регулятор или другой алгоритм автоматического управления. Какой способ работает лучше?
Участников познакомят с теорией автоматического регулирования, покажут, как решают задачи анализа систем управления, программного управления, синтеза обратной связи.
Область знаний:
Техника и инженерные науки
Целевая аудитория:
школьники
Адрес:
117997, Москва, ул. Профсоюзная, д.65
Телефон для справок в дни Фестиваля:
+7(927)528-65-61
Ведущий:
Кочетков Сергей Александрович, доктор технических наук
Организация:
Все мероприятия
этой организации
Это событие на карте:
Добавьте свой комментарий