Автомобили без водителя уже ездят по дорогам

Бывший секретный проект Google теперь в прямом смысле этого слова появляется на публике: компания получила лицензию для тестовых поездок по дорогам общего пользования в Неваде, а до этого приглашались желающие для тестовой поездки на закрытой площадке.
На данный момент принадлежащий поисковому гиганту флот робототизированных автомобилей «Тойота Приус» отмотал более 300 тысяч километров в городском окружении, на оживленных трассах и горных дорогах лишь с частичными вмешательствами человека. Проект всё ещё далек от выхода на рынок, но в Google в собственном кампусе установили беспилотные гольф-карты, которые наглядно демонстрируют, как уже в ближайшем будущем новая технология может изменить мир.
В сентябре прошлого года профессор компьютерных наук Стэндфордского университета Себастьян Тран, который руководит разработкой, и Крис Урмсон, инженер компании Google, рассказали об основных идеях проекта на Международной конференции интеллектуальных роботов и систем Института инженеров электротехники и электроники в Сан-Франциско. Они объяснили, как работает машина и показали несколько видеороликов и дорожных тестов, включая небольшой фрагмент того, как бортовой компьютер «видит» другие транспортные средства, пешеходов и регулировочные огни.
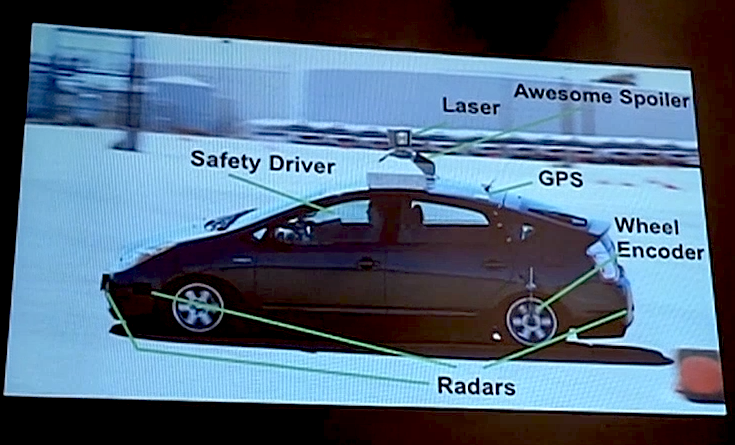
Как рассказал Урмсон, технический руководитель проекта, ядром системы является 64-лучевой лазерный светодальномер производства компании «Велодайн», установленный на крыше автомобиля. Прибор помогает сгенерировать детальную объемную карту окружающего пространства. Затем машина комбинирует измерения лазера с высокоточными картами мира и производит различные типы моделей данных, которые позволяют вести движение, избегая препятствия и проблемы с законом. Также на борту установлены другие сенсоры, включая четыре радара на переднем и заднем бамперах, камеру рядом с зеркалом заднего вида; датчик системы GPS, блок инерциальных измерений и колесный датчик, которые определяют положение транспортного средства и отслеживают движение.

Любопытно отметить некоторые детали. Во-первых, разработка Google сильно зависит от тщательно проработанных карт поверхности Земли, что, по словам Урмсона, является неотъемлемым условием для точного определения местоположения машины. Использование системы глобальной навигации может дать погрешность в несколько метров.
Во-вторых, перед тем, как отправлять машину на беспилотный заезд, инженеры Google проезжают по маршруту самостоятельно один или более раз для сбора информации об окружающем пространстве. При поездке в автономном режиме машина сравнивает данные с предыдущими состояниями, что позволяет отделить пешеходов от таких стационарных объектов как, например, почтовые ящики или столбы. В предыдущем видеоролике можно заметить следующие результаты. В один из моментов машина остановилась на перекрестке и после зеленого сигнала светофора уступила дорогу пешеходам прежде, чем повернуть налево и продолжить движение.
Иногда беспилотник вынужден быть более агрессивным. Например, проезжая через перекресток, он пропускает другие машины согласно правилам дорожного движения, но если другие транспортные средства не ответят взаимностью, он слегка рванет вперед, чтобы показать намерение. Без программирования этого поведения в реальном мире робот ездить не сможет.
Очевидно, что инженерам Google работать над проектом нравится — посмотрите на довольное лицо Урмсона на 13-ой минуте, когда он, сидя на сиденье водителя, наблюдает, как беспилотник гоняет по парковке компании, скрипя шинами на каждом повороте. Но у проекта серьезное намерение: Тран и многие из его коллег, включая отцов-основателей Google, считают, что «умные» машины позволят сделать передвижение на автомобиле более безопасным и эффективным: машины будут ехать ближе друг к другу, что увеличит количество свободного места на дорогах. Программа реагирует быстрее, чем человек, что поможет избежать аварий и сохранить тысячи жизней.
Урмсон также предложил сценарий, в котором транспортные средства становятся общим ресурсом, услугой, которой люди могут воспользоваться при необходимости. Для появления машины будет достаточно всего лишь выбрать соответствующую опцию в смартфоне, а в поездке можно будет расслабиться в кресле водителя — вести авто не потребуется. На конференции был продемонстрирован ролик концепта «Кэдди Бета», в роли общих автомобилей — гольф-карты. Для них используется начинка попроще, чем для образцов «Тойоты Приус»: сенсоры на транспортных средствах взаимодействуют с сенсорами, размещенными в окружающей среде, чтобы определить положение и «узнать» о движении других.
Тран и Урмсон признают, что впереди стоит ещё много нерешенных проблем: улучшение надежности, юридические вопросы ответственности, но это не останавливает их. Как сказал Тран, проблемы траспорта, которые другими считаются убыточными, для них кажутся перспективными.
Еще видео:
Источник: www.habrahabr.ru
| Файл | Файл | Размер |
|---|---|---|
 | Схема автомобиля-беспилотника | JPG, 735x445px, 503 КБ |
 | Беспилотный автомобиль на улицах Невады | JPG, 825x449px, 111.2 КБ |


{kind=link}
{kind=link}
Комментарии
- ответить
12:23, 10.06.2012 № 1Отличная статья! Всем советую.
- ответить
16:02, 05.04.2013 № 2Вы пробовали заставить рыбу плыть хвостом вперёд? Конструкторы автомобилей, не понимая, именно это и делают. Такое впечатление что это нужно для того чтобы расходовать как можно больше топлива, физическое доказательство открытия см. http://otvp.org/nature_url/e18b_e_pov.php#e18b_e_pov_b
Добавьте свой комментарий